1. PENDAHULUAN
1.1. Latar Belakang
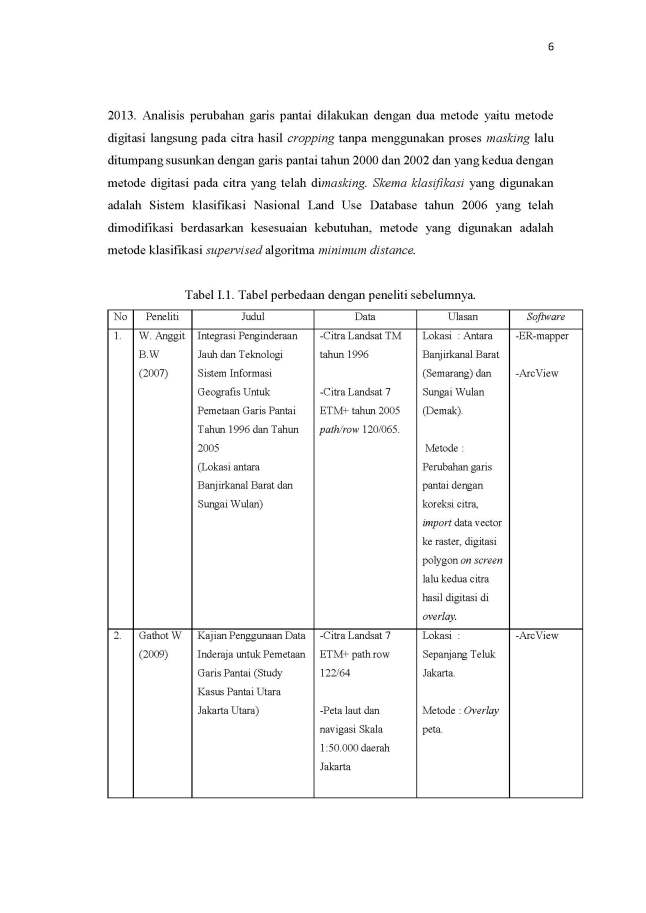
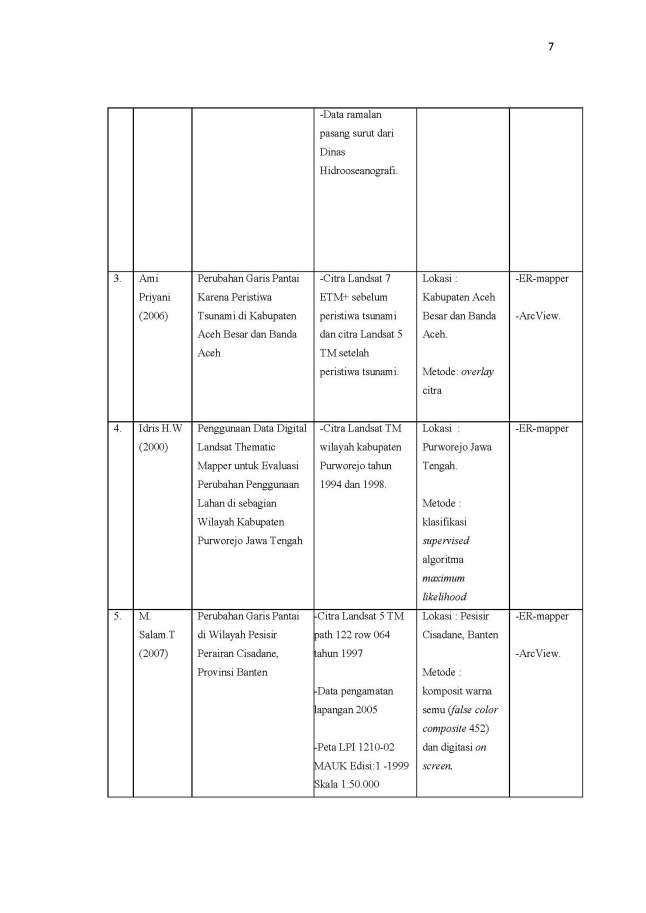
Indonesia pernah tercatat mengalami masa swasembada pangan (beras) pada tahun 1980 an, namun beberapa tahun kemudian mengalami kemunduran produksi pangan hingga saat ini. Dengan mengenang masa kejayaan tersebut pemerintah bertekad untuk mewujudkan masa swasembada pangan seperti yang pernah tercatat dalam sejarah Indonesia sebelumnya. Beberapa upaya pemerintah untuk mewujudkan swasembada pangan adalah dengan melakukan perubahan besar – besaran di sector pertanian. Perubahan tersebut meliputi pengadaan bibit unggul tanaman padi dan palawija, penyediaan dan perbaikan sarana jaringan irigasi yang memadai untuk seluruh pelosok tanah pertanian di Indonesia, melakukan penyuluhan dan pelatihan untuk petani, menyediakan pupuk gratis dan menekan angka perubahan fungsi lahan pertanian (perijinan alih fungsi lahan).
Dalam hal ini saya akan lebih memfokuskan upaya pemerintah dalam menyediakan dan memperbaiki sarana irigasi yang merupakan salah satu parameter yang berpengaruh terhadap proses produksi khususnya di bidang pertanian.
Dengan adanya irigasi yang memadai akan berdampak pada ketersediaan air yang cukup dan berimbas pada hasil produksi pangan yang optimal, sehingga tujuan pemerintah untuk mewujudkan kembali masa swasembada pangan khususnya di Daerah Irigasi Rentang S.I Gegesik Kab.ndramayu – Cirebon akan tercapai.
Untuk mengembalikan kembali fungsi jaringan irigasi maka diperlukan metode dan alat survey penentuan beda tinggi levelling yang tepat sehingga air akan mengalir dengan lancar dan merata sampai ke seluruh saluran yang ada. Berkaitan dengan hal tersebut, maka Satker BBWS Cimanuk-Cisanggarung melalui PPK Perencanaan dan Program pada tahun 2016 melakukan pekerjaan Modernisasi Jaringan Irigasi D.I Rentang S.I Gegesik Kab. Indramayu – Cirebon sepanjang 26. 683 Km ditandai dengan sta GS 1 – GS 516.
Dalam makalah ini saya akan membahas perbandingan/komparasi metode dan alat pengukuran / survey yang berkaitan dengan survey beda tinggi / levelling. Metode dan alat yang akan dibandingkan/komparasi yaitu waterpass (penyipat datar), theodolite, altimeter dan gps.
2. STUDY KASUS
Perbandingan/komparasi metode dan alat survey beda tinggi / levelling untuk proyek pekerjaan Modernisasi Jaringan Irigasi D.I Rentang S.I Gegesik Indramayu – Cirebon, Jawa Barat, Indonesia
3. RUMUSAN MAKALAH
- Metode apakah yang digunakan pada alat waterpass, theodolite, altimeter dan gps dalam survey penentuan beda tinggi ?
- Metode dan alat mana yang paling mudah?
- Metode dan alat mana yang paling akurat dalam survey penentuan beda tinggi?
- Metode dan alat manakah yang paling cocok dan memungkinkan digunakan dalam proyek pekerjaan Modernisasi Jaringan Irigasi D.I Rentang S.I Gegesik Indramayu – Cirebon, Jawa Barat, Indonesia ?
- Apa kelemahan dan kelebihan dari masing – masing metode dan alat survey tersebut ?
- Terkait dengan budget/cost/anggaran biaya, metode manakah yang efisien ?
4. TUJUAN MAKALAH
- Memenuhi syarat penyerahan makalah ilmiah proyek akhir tahun.
- Menentukan metode dan alat mana yang paling efisien diterapkan di lapangan, terkait waktu, biaya dan man power.
5. DASAR TEORI
Survey / pengukuran beda tinggi adalah suatu pekerjaan pengukuran untuk menentukan beda tinggi beberapa titik dimuka bumi terhadap tinggi muka air laut rata-rata (mean sea level). Pekerjaan survey ini diaplikasikan pada pekerjaan konstruksi bangunan dimana titik titik konstruksi harus ditentukan ketinggiannya atau elevasinya. Untuk pekerjaan pengukuran pada pekerjaan konstruksi memerlukan alat pengukur beda tinggi yang mempunyai akurasi yang tinggi. Diantaranya sebagai berikut :
5.1. Waterpass / penyipat datar
Merupakan salah satu alat yang biasa dipakai pada pekerjaan pengukuran beda tinggi. Waterpass/penyipat datar yang dipakai untuk pengukuran beda tinggi harus mempunyai akusari yang disyaratkan , dengan kata lain, data hasil pengukuran harus akurat, sehingga dapat menghasilkan pengukuran yang tepat.
5.1.1. Prinsip dan Fungsi Pengukuran Beda Tinggi
Pengukuran beda tinggi dengan menggunakan waterpass/penyipat datar dilakukakan dengan cara mendirikan alat diantara dua buah rambu yang berdiri vertical. Dimana lokasi rambu tersebut diletakkan pada titik yang akan ditentukan beda tinggi / elevasinya. Data dari hasil bacaan benang tengah rambu depan A dan bacaan benang tengah rambu belakang B digunakan untuk perhitungan beda tinggi /elevasi.
5.1.2. Perhitungan beda tinggi / elevasi
Perhitungan beda tinggi menggunakan rumus sebagai berikut :
BT = BTB – BTA
Dimana :
BT = beda tinggi
BTA = bacaan benang tengah rambu depan A
BTB = bacaan benang tengah rambu belakang B
Dalam setiap pengukuran tidak lepas dari kesalahan pembacaan angka, sehingga diperlukan koreksi antara hasil yang didapat di lapangan dengan hasil dari perhitungan. Koreksi bacaan dapat dihitung dengan menggunakan rumus berikut :
BTA = BAA – BBA
BTB =BAB – BBB
Dimana :
BTA = Bacaan benang tengah rambu depan A
BTB = Bacaan benang tengan rambu belakang B
BAA = Bacaan benang atas rambu depan A
BBA = Bacaan benang bawah rambu depan A
BAB = Bacaan benang atas rambu belakang B
BBB = Bacaan benang bawah rambu belakang B
5.1.3. Syarat – syarat pesawat penyipat datar.
- Garis bidik teropong harus sejajar dengan garis arah nivo.
- Garis arah nivo harus tegak lurus pada sumbu kesatu.
- Garis mendatar diafragma harus tegak lurus pada sumbu kesatu.
5.1.4. Metode double stand
- Dirikankan statif diantara 2 titik (rambu) pastikan kepala statif pada kondisi datar, kemudian pasang penyipat datar diatas statif kemudian dikunci. Atur kondisi teropong sampai datar dengan memutar skrup a,b,c dan pastikan gelembung nivo beradapa pada posisi sentering.
- Dirikan rambu ukur secara tegak lurus disisi depan dan belakang alat penyipat datar.
- Baca benang tengah rambu depan dan rambu belakang.
- Pindahkan alat penyipat datar didepan rambu belakang berjarak ± 5 meter.
- Baca benang tengah rambu depan dan rambu belakang.
- Hitung beda tinggi kedua titik yang diukur pada posisi pertama dan kedua. Hasilnya harus sama, jika nilai beda tinggi posisi pertama berbeda dengan posisi kedua maka alat tidak layak pakai.
5.2. Theodolit
Theodolit merupakan alat untuk ukur sudut dan jarak. Theodolit juga dapat digunakan untuk mengukur ketinggian suatu kedudukan dengan prinsip pengukuran sudut horizontal hz dan sudut vertical hv. Theodolite sering dimanfaatkan untuk pengukuran polygon, pemetaan situasi maupun pengamatan azimuth matahari. Untuk pekerjaan konstruksi theodolite dianggap sebagai alat paling canggih diantara alat survey yang lain, namun untuk ketelitian pengukuran beda tinggi masih dibawah waterpass/penyipat datar.
5.2.1. Metode tachimetri
Metode tachymetri adalah suatu proses penentuan beda tinggi dari titik-titik pengamatan dengan cara mengukur sudut miring atau sudut vertikalnya dengan jarak yang diketahui, baik jarak dalam bidang datar maupun jarak geodetis (Basuki, 2006).
5.2.2. Prinsip metode tachymetri
Prinsip metode tachymetri didasarkan pada prinsip segitiga-segitiga sebangun, sisi yang sepihak adalah sebanding. Kebanyakan pengukuran tachymetri adalah dengan garis bidik miring karena adanya keragaman topografi, tetapi perpotongan benang stadia dibaca pada rambu tegak lurus dan jarak miring “direduksi” menjadi jarak horizontal dan jarak vertikal. Pengukuran beda tinggi dengan metode tachymetry hanya dapat dilakukan untuk titik yang terlalu jauh, sehingga pengaruh kelengkungan bumi dan refraksi dapat diabaikan atau diadakan koreksi linier dalam perhitungannya.
5.2.3. Rumus perhitungan metode tachymetry
∆HAB = dm x sin I + ta – BT
dAB = dm x cos i
dimana :
∆HAB = Beda tinggi titik AB
BT = bacaan benang tengah rambu dititik B
i = inklinasi (sudut miring)
ta = tinggi alat
dm = jarak miring titik AB
dAB = jarak datar titik AB

5.2.4. Langkah metode pengukuran tachymetri
- Dirikan alat dititik A.
- Ukur tinggi alat.
- Posisikan rambu ukur diposisi titik B, yang akan ditentukan beda tingginya.
- Baca benang tengah rambu ukur B.
- Baca nilai sudut horizontal dan vertikal.
- Ukur jarak AB dengan EDM
- Hitung nilai beda tinggi AB dengan rumus di atas.
5.3. Altimeter
Altimeter merupakan salah satu alat survey yang digunakan untuk mengukur/menentukan tinggi suatu kedudukan di atas permukaan laut (mean sea level). Altimeter banyak dimanfaatkan untuk penerbangan, pendakian dan kegiatan lainnya yang berhubungan dengan ketinggian.
Berdasarkan cara kerjanya altimeter dibagi menjadi 4 macam yaitu, barometric altimeter, sonic altimeter, aser altimeter dan radar altimeter. Dalam makalah ini hanya akan dibahas tentang barometric altimeter. Beberapa hal yang harus diperhatikan dalam pemakaian altimeter antara lain :
- Altimeter harus dikalibrasi
- Altimeter sangat peka terhadap guncangan, perubahan cuaca dan perubahan temperature.
Perhitungan ketinggian barometric altimeter didasarkan pada pengukuran tekanan atmosfer.
Hukum Boyle dan Charles :
P.V = R.T
Dimana :
P = Tekanan udara persatuan massa (Newton/m²)
V = Volume udara persatuan masa (m³)
T = Temperatur udara dalam satuan kelvin (00C =2730 K)
R = Konstanta udara 8,31447 J/(mol.K)

Dimana :
p = massa jenis air raksa (hidragium)
g = gravitasi -9.80665 m/s²
h = tinggi titik dari MSL (mean sea level)
5.3.2. Prinsip Altimetri
Prinsip pengukuran altimetry yaitu mengukur beda tekanan atmosfer suatu ketinggian kemudian hasilnya akan direduksi menjadi beda tinggi. Pengukuran dengan metode ini relalatif mudah, namun butuh ketelitian yang lebih dalam pembacaan ukurannya.
- Semakin tinggi suatu kedudukan, semakin rendah tekanan. Tekanan udara menurun dengan peningkatan ketinggian ± 100 hectopascals per 800 m (1” inci dari merkuri per 1000 kaki di dekat permukaan laut.
- Pada ketinggian rendah di atas permukaan laut, tekanan menurun ± 1,2 kPa untuk setiap 100 m.
Altimeter bekerja dengan prinsip :
- Tekanan udara (paling umum digunakan)
- Magnet bumi (dengan perhitungan sudut inklinasi)
- Gelombang (ultra sonic maupun infra merah dll)
- Penggunaan altimeter selalu diikuti dengan penggunaan kompas untuk menentukan arah.
5.3.3. Langkah pengukuran beda tinggi metode altimetry ada 2 cara
5.3.3.1. Metode altimetry tunggal
- Tempatkan altimeter pada titik awal A, catat tekanan dan temperature pada titik A
- Pindah ke titik B, catat tekanan dan temperature di titik B, lanjut pindah ke titik selanjutnya dan catat kembali tekanan dan temperaturnya.
- Hitung ketinggian tiap titik yang telah diukur
- Hitung beda tinggi antar titik yang akan diketahui beda tingginya.
Catatan : Untuk tiap pengukuran tunggal sangat riskan terhadap kesalahan akibat perubahan tekanan atmosfer, untuk menghindari galat/kesalahan pengukuran metode altimetry ini sebaiknya digunakan metode altimetry simultan dengan menggunakan 2 alat altimeter.
5.3.3.2. Metode altimetry simultan
- Tempatkan altimeter pada titik yang akan diukur beda tingginya, catat tekanan dan temperature pada masing – masing titik pada waktu bersamaan. Hitung ketinggian tiap titik yang telah diukur
- Hitung beda tinggi antar titik yang akan diketahui beda tingginya.
Catatan : Untuk memudahkan pengukuran gunakan handy talky untuk koordinasi waktu pengukuran (pencatatan hasil ukuran tekanan dan temperature).
5.4. GPS (Global Positioning System)
5.4.1. Pengertian GPS
GPS merupakan suatu system navigasi yang memanfaatkan satelit dengan gelombang radio yang didesain sebagai penyedia data posisi, kecepatan dan informasi waktu dengan akurasi cukup tinggi tanpa dipengaruhi oleh kondisi cuaca. Informasi waktu yang dihasilkan merupakan waktu yang berada di hampir semua tempat di muka bumi. Data yang disediakan oleh satelit GPS merupakan data yang up to date atau bersifat real time.
GPS merupakan system yang dibuat oleh tentara angkatan laut Amerika Serika yang awalnya dimanfaatkan untuk teknologi perencanaan system perang, namun akhir ini sudah dikembangkan untuk berbagai macam aplikasi termasuk diaplikasikan dalam survey. Sistem GPS terdiri dari 3 segmen yaitu segmen luar angkasa, segmen control dan segmen user / pengguna. Berikut penjelasan masing – masing segmen :
Segmen luar angkasa terdiri dari konstelasi satelit yang mengirimkan sinyal kepada pengguna. Terdapat setidaknya 24 satelit menggelilingi bumi pada ketinggian 20.200 km, dimana setiap satelitnya mengelilingi bumi sebanyak 2 kali dalam sehari atau 12 jam untuk satu kali periode orbit (mengelilingi bumi).
Segmen kontrol terdiri dari segmen pemantau jaringan diseluruh dunia dan stasiun yang mengatur satelit dalam orbit mereka dan pengaturan jam satelit. Segmen ini juga menjejaki satelit-satelit GPS, mengunggah dan memperbaharui data navigasi, serta mengecek status dankondisi dari setiap satelit konstelasi.
Segmen pengguna terdiri dariGPS receiver (atau penerima sinyal GPS). Kemudian digunakan untuk keperluan perhitungan posisi 3D dan waktu.
5.4.1.1. Faktor yang Mempengaruhi Penentuan Posisi pada GPS
Presesi merupakan pergerakan sumbu rotasi bumi dalam ruang secara sekular atau dalam waktu panjang. Periode presesi cukup panjang yaitu 25.800 tahun. Akibat adanya presesi, titik potong antara vernal equinox dengan bidang ekuator bergerak sepanjangekliptika dengan laju 50,4” per tahun.
Nutasi terjadi karena bulan mengelilingi bumi dengan sudut 5o11’, terhadap bidang ekliptika. Garis perpotongan antara bidang ekliptika dengan rotasi bulan dinamakan dengan garis nodal. Periode nutasi di ruang inersia adalah 18,6 tahun.
Pergerakan kutub merupakan pergerakan sumbu rotasi bumi terhadap kerak bumi, pergerakan kutub tidak dapat dijelaskan secara teoritis namun dapat dibuktikan dengan cara empiris.
5.4.2. Metode static dengan perhitungan triangulasi dengan GPS
Penentuan tinggi / elevasi pada GPS menggunaan perhitungan triangulasi, GPS mengukur jarak dengan menggunakan travel time sinyal radio yang memerlukan akurasi waktu yang tinggi. Untuk menghitung jarak, posisi satelit dan ketinggian GPS pada orbit harus diketahui. Waktu delay perjalanan sinyal di atmosfer dari GPS sampai diterima oleh receiver harus dikoreksi. Hasil dari pengukuran metode statis juga harus dikoreksi dengan menambahkan nilai N (tinggi geoid) agar data tinggi dari pengukuran GPS dapat digunakan.
5.4.3. Prinsip perhitungan triangulasi GPS
Prinsip triangulasi GPS adalah pengukuran jarak antara GPS receiver dan satelit. Jarak diketahui dengan menghitung lama waktu tempuh gelombang dengan cepat rambat gelombang. Untuk memastika kecepatan waktu cepat rambat gelombang, pada GPS dilengkapi dengan jam atom sebagai panduan waktu dasar dengan ketelitian sangat tinggi.
- Satelit pertama , kedua dan ketiga memiliki waktu yang sama tetapi jarak satu dengan lainnya berbeda. Ketika satelit pertama mengirimkan data waktu dan posisinya ke receiver, maka akan ada jeda waktu dari waktu pengiriman dengan waktu diterima oleh receiver. Begitu juga dengan satelit ke dua dan ketiga. Perbedaan waktu dan posisi satelit itulah yang digunakn untuk perhitungan posisi receiver.
- Pada pengukuran GPS tidak lepas dari kesalahan pembacaan sinyal akibat delay perjalanan sinyal GPS di atmosfer. Pembangkit waktu pada receiver GPS juga tidak seakurat seperti yang digunakan pada GPS satelit. Sehingga variable waktu (T) tidak diketahui. Untuk mengukur data ketinggian dibutuhkan 4 satelit. Dengan data dari 4 satelit tersebut kita memiliki 4 variabel X,Y,Z dan T. Untuk menghitungnya dibutuhkan 4 persamaan metematika yang berbeda dari 4 variabel tersebut. Dari persamaan tersebut menghasilkan data posisi dan ketinggian.
- Data ketinggian yang dihasilkan GPS tidak dapat digunakan seperti pada data ketinggian yang dihasilkan oleh alat lain karena data ketinggian GPS merupakan data ketinggian semu yaitu data tinggi di atas ellipsoid, sedangkan kita berdiri di atas geoid.
Geoid adalah bidang ekipotensial gaya berat bumi yang menyinggung muka laut. Namun permukaan laut sangatlah dinamis karena dipengaruhi factor angin, cuaca dll, oleh karena itu pada banyak kondisi selalu digunakan nilai rata-rata permukaan air laut atau mean sea level (MSL) sebagai pendekatan dari geoid. Geoid sendiri merupakan bentuk bumi yang mendekati keadaan sebenarnya.

Gambar. 1. Geoid
Ellipsoid merupakan representasi dari bumi yang memiliki bentuk beraturan sehingga sering digunakan dalam bidang survey/geodesi untuk rujukan perhitungan secara matematis.

Gambar. 2. Ellipsoid
a = sumbu panjang ellipsoid
b = sumbu pendek ellipsoid
f = penggepengan bumi
Perbandingan tinggi dari hasil pengukuran GPS merupakan tinggi semu (tinggi di atas ellipsoid) direpresentasikan dengan gambar berikut.

Gambar. 3. Perspektif tinggi geoid dan tinggi ellipsoid
Untuk mengetahui nilai tinggi sebenarnya dapat menggunakan rumus :
H = h + N
Dimana :
H = tinggi orthometrik, tinggi sebenarnya
h = tinggi ellipsoid, tinggi dari data hasil engukuran GPS
N = tinggi geoid (perbedaan tinggi Antara ellipsoid dan geoid)
Jadi untuk dapat menggunakan data ketinggian dari hasil pengukuran GPS, kita harus mereduksi data ketinggian GPS tersebut ke geoid. Untuk mereduksi data ketinggian dari pengukuran GPS kita perlu menambahkan nilai N (tinggi geoid). Nilai N di setiap tempat berbeda – beda karena bentuk bumi yang tidak beraturan.
5.4.4. Langkah penggunaan GPS dengan metode static
- Pasang statip dan tribach pada titik yang akan diukur
- Pasang vertical extention bar pada tribach adapter, sambungkan ke atenna kemudian tempatkan pada statip.
- Pasangkan kabel atenna pada atenna dan GPS, siapkan field bracket untuk penempatan GPS, kemudian letakkan pada statip. Ukur tinggi tanah ke atenna.
- Nyalakan GPS, tekan ikon surveying. Mulai pengamatan / pengukuran.
6. ANALISA DAN PEMBAHASAN
6.1. Analisa Terhadap Mutu
Tujuan dari analisa Mutu ini adalah untuk menentukan metode mana yang mempunyai mutu/kualitas/akusari paling besar sehingga dapat diterapkan dalam pekerjaan survey pengukuran beda tinggi pada proyek Modernisasi Jaringan Irigasi D.I Rentang S.I Gegesik Kab. Indramayu – Cirebon.
Metode pengukuran yang digunakan pada waterpass/penyipat datar adalah metode double stand karena metode double stand ini dianggap sebagai metode paling baik yang menghasilkan data lebih akurat dibandingkan dengan metode single stand. Dengan metode double stand semua ukuran tiap sesi pengukuran langsung dikoreksi dengan cara pengukuran 2 kali. Kelemahan pada metode ini terletak pada lamanya waktu pengukuran karena harus dilakukan 2x untuk tiap sesi.
Metode pengukuran yang digunakan pada theodolite adalah metode tachimetri. Dari hasil pengukuran menggunakan metode tachimetri menghasilkan data survey beda tinggi optis, yaitu hasil data survey beda tinggi merupakan konversi dari perhitungan jarak dan sudut optis. Data beda tinggi optis dari metode tachimetri ini dianggap kurang akurat, theodolite sendiri merupakan alat yang didesain untuk pengukuran jarak dan sudut. Kelemahan pada metode ini terletak pada tingkat keakurasian data dan biaya yang dikeluarkan lebih mahal untuk sewa alat dan man power (SDM).
Metode pengukuran menggunakan barometric altimeter ini dikenal dengan metode altimetry. Tingkat akurasi dari hasil pengukuran beda tinggi altimetry kurang baik, karena data tersebut merupakan data tinggi hasil konversi. Selain itu kelemahan pada metode altimetry dipengaruhi oleh perubahan cuaca, atmosfer, goncangan dan ketepatan waktu saat pengukuran karena harus dilakukan bersamaan. Untuk pengukuran di medan yang berjarak jauh sangat tidak recommended.
Metode pengukuran beda tinggi pada GPS menggunakan metode static dengan perhitungan triangulasi. Tingkat akurasi data beda tinggi hasil pengukuran GPS dianggap sebagai beda tinggi semu sehingga data hasil pengukuran dengan GPS sangat tidak recommended untuk survey pekerjaan yang membutuhkan data elevasi dengan akurasi tinggi seperti pada pekerjaan konstruksi.
Untuk menunjang kelancaran pekerjaan di proyek Modernisasi Jaringan Irigasi D.I Rentang S.I Gegesik Kab. Indramayu – Cirebon sebaiknya digunakan alat waterpass / penyipat datar dengan metode double stand untuk pengukuran beda elevasi dan meggunakan theodolite untuk pengukuran jaraknya. hal ini didasarkan pada pertimbangan tingkat akurasi data, tingkat kemudahan pelaksanaan pengukuran dilapangan dan tingkat efisiensi biaya. Namun pada pengukuran beda tinggi dengan metode double stand mempunyai kelemahan yaitu membutuhkan waktu yang sedikit lebih lama dibandingkan dengan menggunakan metode single stand.
6.2. Analisa Terhadap Biaya
Tujuan dari analisa biaya adalah untuk menentukan metode mana yang membutuhkan biaya paling efisien sehingga dapat diterapkan dalam pekerjaan survey pengukuran beda tinggi pada proyek Modernisasi Jaringan Irigasi D.I Rentang S.I Gegesik Kab. Indramayu – Cirebon.
Berdasarkan analisa biaya, pengukuran beda tinggi metode double stand dengan menggunakan alat water pass dianggap paling cocok digunakan untuk proyek Modernisasi Jaringan Irigasi D.I Rentang S.I Gegesik Kab. Indramayu – Cirebon. Berikut penjelasan analisa biaya :
- Biaya sewa alat water pass lebih rendah dibandingkan sewa alat theodolite, altimeter dan GPS geodetic.
- Biaya operasional di lapangan berdasarkan kebutuhan pekerjaan survey lebih rendah karena jarak moving area pendek.
- Biaya untuk anggaran upah relative rendah karena tidak membutuhkan man power yang banyak dan trampil. Hal ini berkaitan dengan kemudahan dalam pengoperasian alat waterpass/penyipat datar.
- Berdasarkan lamanya waktu pengerjaan di lapangan biaya dapat ditekan, karena dengan menggunakan metode double stand data yang diperoleh adalah data dengan akurasi tinggi sehingga untuk mengulang pekerjaan pengukuran dapat diminimalisir.
7. ANALISA RESIKO
Tujuan dari analisa resiko ini adalah untuk menentukan metode mana yang mempunyai resiko paling kecil sehingga dapat diterapkan dalam pekerjaan survey pengukuran beda tinggi pada proyek Modernisasi Jaringan Irigasi D.I Rentang S.I Gegesik Kab. Indramayu – Cirebon.
- Untuk pekerjaan konstruksi khususnya proyek Modernisasi Jaringan Irigasi D.I Rentang S.I Gegesik Kab. Indramayu – Cirebon memerlukan perencanaan elevasi yang tepat. Dengan demikian penggunaan metode double stand dan alat waterpas dalam pengukuran beda tinggi merupakan pilihan yang tepat mengingat hasil pengukuran beda tinggi / elevasi yang didapat merupakan data beda tinggi paling akurat dibandingkan dengan peolehan data dari metode lain.
- Dengan tingkat akurasi data yang diperoleh tersebut dapat meminimalisir resiko kesalahan perencanaan bangunan dan pengulangan pekerjaan survey di lapangan.
8. KESIMPULAN DAN SARAN
Kesimpulan yang dapat ditarik dari makalah perbandingan beberapa metode survey penentuan beda tinggi (levelling) untuk proyek Modernisasi Jaringan Irigasi D.I Rentang S.I Gegesik Indramayu – Cirebon ini Antara lain :
- Survey penentuan beda tinggi (levelling) paling akurat diperoleh dari hasil pengukuran waterpass dengan menggunakan metode double stand.
- Kelemahan metode double stand adalah lamanya pelaksanaan dilapangan, namun dengan menghasilkan data yang akurat hal tersebut dapat ditekan/tidak masalah.
- Dengan menggunakan metode double stand dan alat survey waterpass dapat menekan biaya pekerjaan.
Saran :
- Sebaiknya penggunaan alat survey waterpass dikalibrasi secara berkala, untuk menghasilkan data yang akurat.
- Sebelum memulai pekerjaan survey di lapangan sebaiknya dilakukan koordinasi terlebih dahulu, sehingga pekerjaan dilapangan dapat diselesaikan sesuai target.
- Sebaiknya pada pekerjaan pengukuran beda tinggi/levelling memperhatikan waktu. Waktu paling baik untuk pekerjaan survey yaitu Antara jam 08.00 – 11.00 dan jam 14.00 – 16.00. Mengingat undulasi/fatamorgana dapat mempengaruhi penglihatan dalam pembacaan rambu ukur
- Sebaiknya man power dalam pekerjaan survey memperhatikan stamina/kesehatan. Jangan sampai kelelahan. Karena pekerjaan survey memerlukan kondisi tubuh yang fit.
REFERENSI
- vedcmalang.com
- ilmutekniksipil.com/ilmu-ukurtanah/
- Buku Manual Pesawat Penyipat Datar Merk TOPCON.
- http://fariabel.blogspot.co.id/
- blogspot.com/
- http://amatarpigo.blogspot.co.id/
- http://dyankurniawan.blogspot.co.id/
- http://losbagandos.blogspot.co.id/
- Abidin, H. Z. 2001. Geodesi Satelit. Jakarta: Pradnya Paramita.
- Daly, J. L. 2001. TOPEX-Poseidon Radar Altimetry: Averaging the Averages.
- http://www.john-daly.com/altimetry/topex.htm
- ERS-1 Satellite Concept (1992). http://earth.esa.int/ers/satconc/
- ERS-2 Takes Over Where ERS-1 Left Off (1995).
- http://earth.esa.int/ers/eeo/satconc2.html
- http://ilrs.gsfc.nasa.gov/satellite_missions/list_of_satellites/topx_general.html
- http://ilrs.gsfc.nasa.gov/satellite_missions/list_of_satellites/ers1_general.html
- http://ilrs.gsfc.nasa.gov/satellite_missions/list_of_satellites/ers2_general.html
- Setyajadi, B. 2007. Geodesi Kelautan: Pendahuluan. Bandung: Teknik Geodesi dan Geomatika, Institut Teknologi Bandung.
- https://www.academia.edu/ Abidin, H.Z. 2001. Geodesi Satelit. PT. Pradnya Paramita, Jakarta
- Basith, A. 2001. Model pemrosesan data satelit altimetri Topex/Poseidon untuk analisisharmonik pasut. Thesis Magister. Program Studi Oseanografi dan Saint Pascasarjana ITB, Bandung
- Handoko, E. Y., : Satelit Altimetri dan Aplikasinya Dalam Bidang Kelautan. Scientific Journal, Pertemuan Ilmiah Tahunan I. Teknik Geodesi – ITS, Surabaya, Indonesia , 2004.
- http://oceanmotion.org/html/gatheringdata/satellites.htm/TOPEX/PoseidonSatellites
- http://geodesy.gd.itb.ac.id/?page_id=500/Satelit Altimetri
- http://geodesy.gd.itb.ac.id/?page_id=94/ Studi Karakteristik Muka Laut dengan Satelit Altimetri
- Smith, James R.1997.Introduction to Goedsy. Canada: John Wiley & Sons, Inc.
- Petr Vanicek and Edward J.Krakiwsky. 1986.Geodesy: the concept. North Holand: Amsterdam
- Abidin, H.Z. 2001 Geodesi Satelit. PT Pradnya Paramita, Jakarta
- http://www.floridageomatics.com/
- http://yoghaken.blogspot.co.id/